Cover image: Artist's rendering of the Mars Helicopter, an autonomous rotorcraft which will be a companion vehicle to the Mars 2020 rover. Image credit NASA.
The hype is real, folks. NASA has announced that NASA Jet Propulsion Lab will send a flying scout vehicle to Mars with the Mars 2020 rover in a few years. In this article we'll explore why and how a flying vehicle will work with the rover for Mars Exploration, with special attention to the technology aboard this exciting technology demonstration.
Introducing the Mars Helicopter Scout
Technical information about the Mars Helicopter technology demonstrator and supporting experiments are available to the public, but are unfortunately paywalled AIAA journals and conference proceedings. I will be discussing a small part of the technical details here, but I highly encourage you to read the papers to get a good idea of the designs and capabilities of the Mars Helicopter.
- Bob Balaram, et. al. "Mars Helicopter Technology Demonstrator", 2018 AIAA Atmospheric Flight Mechanics Conference, AIAA SciTech Forum, (AIAA 2018-0023)
- Håvard F. Grip, et. al. "Guidance and Control for a Mars Helicopter", 2018 AIAA Guidance, Navigation, and Control Conference, AIAA SciTech Forum, (AIAA 2018-1849)
- Robin Shrestha, et. al. "Hover Performance of a Small-Scale Helicopter Rotor for Flying on Mars", Journal of Aircraft, Vol. 53, No. 4 (2016), pp. 1160-1167.
The helicopter itself is designed for a gross weight less than 2kg. A fun fact is the full-scale prototype shown in the press release video is actually lighter (at ~800g) because even though JPL engineers can simulate Martian atmosphere in a test chamber, they can't simulate lower gravity. The vehicle is designed around a center shaft that supports the 1.2m diameter coaxial counter-rotating rotors. A small solar array and communications antenna sits above the rotors where it minimally affects flight performance, and all electronics and sensors sit in a small, insulated box beneath the main rotor shaft. Four carbon fiber composite legs support the craft on the ground and have stubby feet that allow the craft to land safely on hard gravel or soft sandy terrain.
Most of the components on board including sensors, avionics, processors, cameras, and motors are all commercial-off-the-shelf (COTS) components. While this reduces cost and complexity, it introduces challenges due to the harsh Martian environment. While dust can be a problem, the main concern is temperature, which can drop as low as -140C during the night. Even when landed for the night, heaters must remain on to keep sensors and electronics "warm" (not below -15C), which puts some tough constraints on the power system.
The helicopter is designed to operate over a period of 30 sols (Martian days), conducting one midday flight per sol with up to 90 seconds of flight time. The vehicle's flight characteristics provide it with ranges up to 300 meters at altitudes from 3 to 10 meters above the surface in winds up to 5 m/s. Flight time is limited by available power from the vehicle's battery. Data will be streamed back to the rover in real-time during flight, but two-way communication is only done when the craft is landed.
The Mars Helicopter will image areas of the surface at resolutions equivalent to the rover's cameras, but will have a much better vantage point from the sky and the ability to travel much further ahead than a rover to scout for safe paths and interesting features. The craft could also land at designated targets and carry or retrieve small samples for analysis by the Mars 2020's laboratory and instruments.
If you thought landing was hard, flying on Mars is a whole other ballgame.
Landing a stationary craft on the surface of Mars is hard. Landing a rover that can drive around is even harder. And getting something to the Martian surface, then having it fly around? Well, to say it is difficult would be an understatement.
Problem 1: The Mars atmosphere is thin. Like, really thin.
Heavier-than-air craft like planes and helicopters have an easier time flying in denser atmospheres. Lift and drag are related to change in momentum of a fluid (gas or liquid) with time. Momentum is equal to the mass times the velocity of the fluid. For a given volume, a denser fluid has more mass, which means more lift at the same speed. Atmospheric density is proportional to pressure[1] and pressure is a lot easier to deal with when comparing Earth to Mars, so we'll switch units here but the relative comparison is the same for density. The atmospheric pressure on the surface of Mars is 0.60 kPa (mean surface pressure) on Mars compared to 101.3 kPa on Earth. So the air pressure standing on Mars would be about the same as the air pressure at an altitude of 35km on Earth.[2] For perspective, the U-2 high-altitude spy plane flew at 21km, the altitude record for a helicopter is 12.4km.[3][4] Lower air densities on Mars also means the speed of sound is much lower as well. This results in an interesting set of design constraints where the speeds the rotor blades have to go need to be higher to produce enough lift, but that means they are closer to the speed of sound.
One thing that makes things a bit simpler for flight on Mars is reduced gravity. Mars gravity is only 3.72 m/s2, or about 38% of the gravity we feel on Earth. Even so, any aircraft on Mars will need to be very small and as light as it could possibly be.
Problem 2: It has to fly itself.
For powered flight, real-time control is essential. Rovers have it easy--the ground doesn't change very much or very quickly so it is much easier to avoid obstacles like boulders, or stop and wait for scientists on the ground before proceeding. In the skies, a vehicle must judge its current velocities, react to irregularities in the air, and manage control surfaces--all in real-time--to maintain flight and course correct without hitting the ground.
The flight control system will have to compensate for winds, dust, turbulence due to temperature and pressure conditions, air flowing around mountains, cliffs and ravines, and all the other unexpected disturbances that could happen in flight--even on a calm day. Further, the goal is not just to fly but to do useful things for the mission like image targets and scout out areas ahead. So the on board computers need to know where the vehicle is with respect to the rover and where an imaged target is with respect to the camera.
Even a decade ago, this would have been an enormous challenge. But in recent years technology has come to a point where small but powerful computers have become commonplace and consumer target-following quadcopters are a reality.
Flying machines on Mars is somewhat novel, but by no means new.
As far back as the early days of modern spaceflight, Wernher von Braun dreamed of fixed wing aircraft being used for Mars transportation in The Mars Project (1953)[5].
NASA seriously considered several fixed-wing aircraft missions for Mars exploration a number of times[6] since then, including MAGE (lost to the Mars Network during mission selection in 1999) and ARES (lost to MAVEN during mission selection in 2009). Both mission concepts involved a fixed-wing aircraft released in mid-air upon arrival to Mars and conducting all measurements and investigations in a single flight. NASA Ames has investigated a number of other Mars flight mission concepts as well.
JPL toyed with the idea of using dirigibles for interplanetary explorations[7][8] with concepts for "microprobes" under 50 kg carried by balloons up to large, high altitude probes that would stay aloft for up to three months.
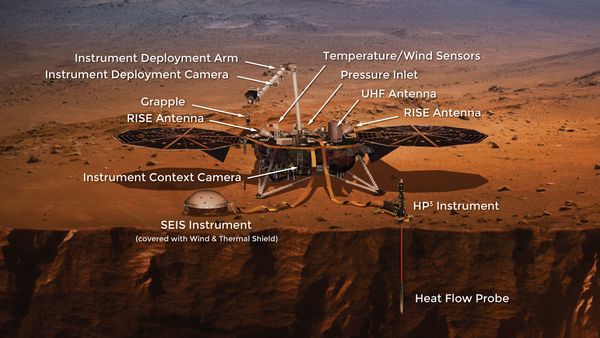
The Mars Geyser Hopper (MGH) mission concept competed with (and lost to) InSight as a Discovery mission to Mars in 2014. Like InSight, MGH was designed on heritage systems from the Phoenix spacecraft and lander, but MGH would be a "hopper," using on-board propulsion to visit multiple sites on the surface.
This isn't the first time NASA has considered sending rotorcraft to Mars, either. In the early 2000s, a team at NASA Ames Research Center conducted some studies that laid the groundwork for the Mars Helicopter we have today. These studies resulted in a mission concept for a static lander similar to the ones used for Mars Pathfinder landers with an aerial vehicle rather than a rover. A 10-15 sol prime mission would be devoted to acquisition and analysis of samples immediately around the landing site, with a 20-40 sol extended mission to collect samples from several kilometers from the lander. I dug up a few papers on this concept mission, and its interesting how forward thinking it was considering many of the aspects described 20 years ago show up in today's Mars Helicopter.
- Young, Larry A., et al. "Rotorcraft as Mars Scouts." Aerospace Conference Proceedings, 2002. IEEE. Vol. 1. IEEE, 2002.
- Young, Larry A., et al. "Mars rotorcraft: possibilities, limitations, and implications for human/robotic exploration." Aerospace Conference, 2005 IEEE. IEEE, 2005.
- Young, Larry A., and Edwin W. Aiken. Vertical lift planetary aerial vehicles: Three planetary bodies and four conceptual design cases. NATIONAL AERONAUTICS AND SPACE ADMINISTRATION MOFFETT FIELD CA ROTORCRAFT DIVISION, 2001.
- Young, Larry A., et al. Experimental investigation and demonstration of rotary-wing technologies for flight in the atmosphere of mars. NATIONAL AERONAUTICS AND SPACE ADMINISTRATION MOFFETT FIELD CA AMES RESEARCH CENTER, 2002.
Most of the missions listed here had robust designs and scientific merit, but consistently lost during the mission selection process to other, "safer" missions. Much of that comes down to the risk inherent to a flight system. For all the effort to send a vehicle to Mars, and all the potential knowledge to gain, NASA wants to spend their money on a sure thing.
Why now, why the Mars Helicopter Scout?
(Disclaimer: This is my opinion!) For one, Mars Helicopter is a technology demonstration, rather than a full blown mission. The helicopter will hitch a ride with Mars 2020 and is not critical to Mars 2020 mission success. This lets the Mars Helicopter accept much more risk, since system or subsystem failure is at some level expected. Remembering our discussion with Joel Steinkraus of the MarCO technology demonstrator for interplanetary CubeSats on SPEXcast Episode 56, it seems that the "test and see what happens" approach that has become feasible in LEO, thanks to CubeSats, is being embraced for systems beyond LEO, especially by JPL. A helicopter makes sense to me, given the significant advancements in drone technology in consumer products. The helicopter can launch and land in precision places, is lightweight by nature, and can easily be used for multiple flights. A helicopter doesn't need a runway nor does it refill an inflatable structure, and can handle a wide range of wind conditions.
I am very excited for this mission and the possibilities for developing new interplanetary powered flight missions!
Extra credit: Helicopter Physics
In order to understand the design and physics behind the Mars Helicopter, let's take a minute to look at how helicopters fly at all.
Helicopters are a type of rotorcraft where long airfoils are spun along an axis to achieve lift. In a helicopter, the rotors provide both lift and control to the aircraft. The rotors are literally rotating wings. As the rotors move through the air by being spun by a motor, they generate lift. But since the physics makes things a little more complicated.
The torque applied to the rotors spins them around, but due to Newton's Third Law a torque of equal magnitude spins the rest of the aircraft in the opposite direction. Helicopters with one main rotor use a smaller rotor at the back and orthogonal to the main one in order to produce thrust to cancel out this reaction force. Mars Helicopter solves this problem by using two coaxial rotors which spin in opposite directions. If the coaxial rotors are spinning at the same speed their torques cancel out, but changing the rotation rate of one relative to the other allows the body of the aircraft to make controlled rotations along the rotor's axis, effectively "turning in place."
Modern helicopters do not change the rotors' rotation speeds to control lift. In fact, the pilot has full control in all 6 spatial degrees of freedom without the need to change the rotors' RPM. All control is done by adjusting the angle of attack of the rotary wing surfaces as they go around, changing the amount of lift a rotor generates at a specific position in its rotation. This linear input from the pilot (tilt forward, for example) is converted into rotating input at the rotor by a swashplate, or Hiller-Bell mechanism. Explaining the mechanics of a swashplate is too far down the rabbit hole for this article, but videos of it makes the engineer in me very happy.
An interesting thing to note is that applying a lift force to one end of the helicopter doesn't tilt it like a see-saw. Rather, it tilts 90 degrees to the input! This is called gyroscopic precession and is an interesting thing that falls out of the physics of rotating bodies.
NASA Glenn Research Center: Earth Atmosphere Model ↩︎
Wikipedia: Flight altitude record - Rotorcraft ↩︎
Quora: What is the highest altitude an average helicopter can fly? ↩︎
Wernher von Braun, The Mars Project. 1953. ↩︎
Wikipedia: Mars aircraft ↩︎
Wikipedia: Aerobot - JPL aerobot experiments ↩︎